
Flame Sensing
For the fireboat to move autonomously, it would need to be able to detect fires. Once the fires had been detected, the boat could move appropriately to get in range of the fire, and then aim the turret at the fire. We ran out of time to implement a flame sensing system for the boat. However, we managed to test out a concept using a photodetector.
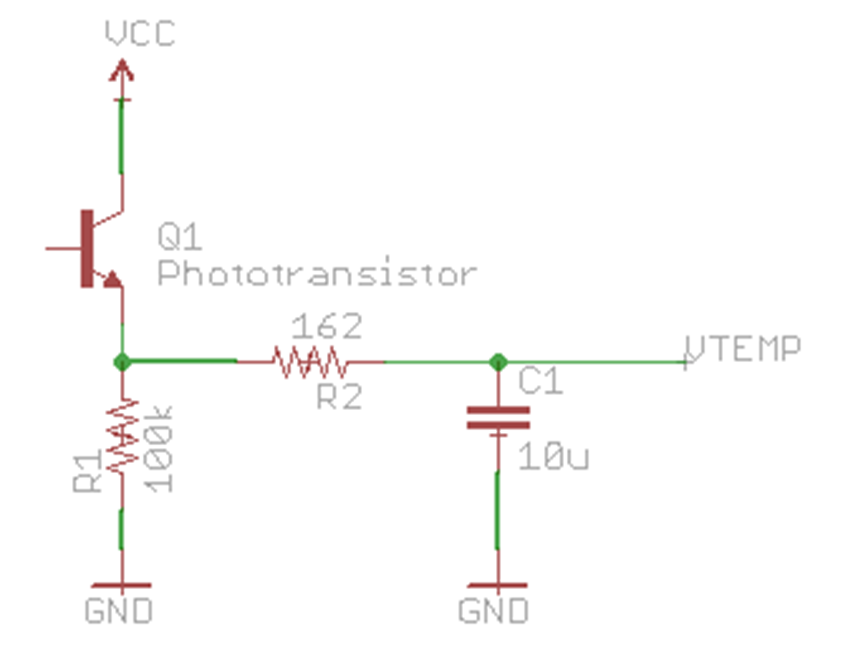
The NPN phototransistor used (Digikey P/N: 475-1439-ND) has a sensitivity which allows it to detect IR light. When light of the appropriate wavelengths fall onto the phototransistor, a gate current is created, which lets current flow from the collector to the emmiter. The output signal is then filtered through a passive RC low pass filter with corner frequency of about 100 Hz. The filter gets rid of some of the interference we were detecting. We suspect the lights were adding some 60 Hz hum to the signal.
The magnitude of the R1 resistor was emperically determined to give the best sensitivity for the sensor. Changing the resistor changes both the gain and the offset of the sensor. The resistor probably changes the current draw from the phototransistor, which then affects the resulting voltage.
Tests have revealed that the sensor can detect the flame from a small lighter up to 3 feet away. This suggests that the sensor should be able to detect bigger fires at greater distances. We did not get to test that theory as we did not get around to make a large fire for testing purposes.
An great benefit of using the phototransistors is that they have a narrow field of view. Therefore by creating an array of them and spacing them appropriately, it would be possible to quantify the direction that a fire is. Unfortunately, distance to a fire would not be quantified, as a large signal could indicate a close small fire or a large fire that is further away. Therefore, in a real application, it would be necessary to have a secondary temperature sensor on the boat. The sensor would monitor the temperature of the boat, and make sure it was not getting to warm i.e. close to a fire.